











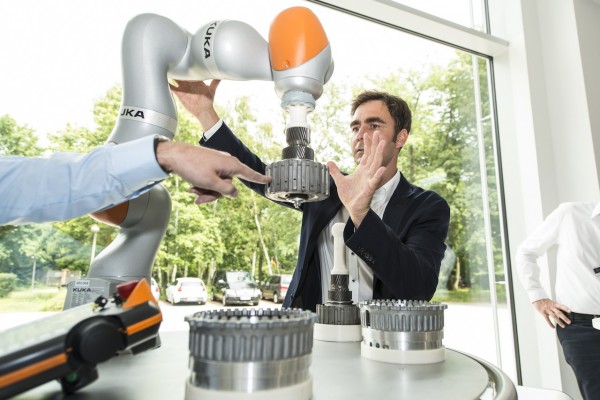
خودروهای بدون نیاز به راننده نظیر سواریهای متمایز گوگل ممکن است نیازی به هدایت ما در پشت فرمان نداشته باشند، اما این به معنای نیاز به شیوهی جدیدی از تعامل خواهد بود تا از طریق آن بتوانیم از زیر گرفته شدن خود توسط سایر خودروها در خیابان جلوگیری کنیم. بنابراین اصل تعامل با خودرو تنها از حالتی به حالت دیگر تغییر ماهیت خواهد داد. آنچه گفته شد نتیجهی تحقیقات جدیدی است که توسط مرسدس بنز صورت پذیرفته است. مرسدس بنز که در این تحقیقات از همراهی و کمک متخصصان رباتیک و زبانشناسان برخوردار بوده تلاش نموده به تعیین راههای تعامل خودروهای خودمختار با سرنشینان و عابران از طریق ژستهای حرکتی و… بپردازد.
مرسدس در تحقیقات خود چنین بیان میکند که اگرچه تمرکز اصلی تحقیقاتی که در زمینهی خودروهای بدون نیاز به راننده انجام میپذیرد تا کنون بر روی جایگزین کردن شخص پشت فرمان قرار داشته، اما شیوهی جایگزینی شیوههای شفاهی و غیرشفاهی ارتباط میان راننده و سایر افراد با خودرو نیز به همان میزان حائز اهمیت است. برای نمونه، رانندگان گاهی از تکان دادن دستان خود برای علامت دادن به عابران استفاده میکنند در حالی که عابران نیز انتظار دارند که با بالا آوردن دست خود در محدودهی کنار خیابان، تمایل خود برای سوار شدن به خودرو را نشان دهند تا وسیلهی مورد نظر برای آنها توقف نماید.
البته در این میان تعاملات خودرو-به-خودرو تحت توسعه بوده که موجب میشود مجموعهای از ترافیک خودروهای خودمختار قادر باشند موقعیت مکانی خود و نیز اطلاعاتی در خصوص محورهای پر تردد و تصادفات صورت گرفته را به یکدیگر گزارش کنند و حتی ایستگاههای پمپ بنزین بهتر را شناسایی نمایند. اکنون Mercedes-Benz با همراهی Ars Electronica Futurelab در حال اجرای آزمایشهایی بر روی کوادکاپترها است تا به تعیین نحوهی درک و پاسخگویی دستگاههای حرکتی هوشمند به ژستهای حرکتی افراد بپردازد.

برای نمونه در یکی از آزمایشات، از یک کوادکاپتر که قابلیت ترجمه و درک ژستهای حرکتی به منظور فراخواندن، توقف، و هدایت کردن به آن افزوده شده برای تعیین حالتهای احتمالی و نحوهی واکنش دستگاه استفاده شده است. در آزمایشی جایگزین، از یک شیء کنترل لمسی برای اعمال همان مراحل استفاده شد که ممکن است روزی در کلید خودروها تعبیه شود.
همچنان خبری از نتیجهی نهایی در خصوص اینکه آیا یادگیری زبان این دستگاهها توسط انسانها راهحل آسانتری خواهد بود یا بالعکس نیست. همچنین ممکن است در نهایت ترکیبی از هر دو حالت برای ایجاد این تعامل مورد استفاده قرار گیرد. تفاوت در ژستهای حرکتی محلی هر منطقه نیز میتواند به نوبهی خود دردسرساز باشد. مسلما ما به شیوهی اروپاییها با نگاه داشتن انگشت خود به سمت مسیر جاده تقاضای توقف خودرو نمیکنیم و چنین حرکاتی در مناطق مختلف فرهنگی-جغرافیایی با تفاوتهایی همراه است. نیاز به انطباق با ناتوانیهای افراد نیز از جمله موانعی است که باید از سر راه برداشته شود.
افزون بر آنچه گفته شد، رسیدن به نتیجه در خصوص گسترهی احتمالی تعاملات میان خودرو و افراد و نیز تعیین اینکه خودرو باید با چه شخصی ارتباط برقرار نماید در کنار به نتیجه رسیدن در خصوص معنای حرکاتی که از نظر ظاهری شباهت بسیاری به یکدیگر دارند همگی از مسائلی به شمار میروند که باید مورد بحث و توسعه قرار گیرند.
به شیوهای مشابه، لازم است در خصوص اینکه تا چه میزان از آگاهی بخشی امنیتی به عابران منتقل شود و چه بخشی بر عهدهی هوشمندی خودرو قرار گیرد نیز از مواردی است که نیاز به تصمیمگیریهای جدی دارد. نحوهی شناسایی افراد و سایر وسیلهها بعنوان نزدیک شدن به موانع نیز اهمیت خاص خود را دارد که در اینگونه موارد خودرو باید بتواند عبور عابران را از نزدیک شدن به اشیاء متحرک دیگر که احتمال برخورد به آنها وجود دارد تشخیص دهد.لازم به ذکر است که خود مرسدس بنز در حال حاضر خودروی بدون نیاز به رانندهی خود را با همکاری بخش HERE نوکیا توسعه داده و راهی خیابانهای آلمان نموده است.
























نظرات کاربران